1 Quá trình liên tục và rời rạc

Các bộ điều khiển quá trình được xem xét trong phạm vi liên quan đến điều khiển quá trình liên tục và điều khiển quá trình rời rạc.
Quá trình hên tục (continuous processes) là loại có xuất/nhập liên tục. Bộ điều khiển trong một hệ thống điều khiển có phản hồi với quá trình liên tục phát hiện sai lệch và thực hiện một sô' phương pháp điều khiển, chuyển đổi sai lệch , tức là chênh lệch giữa các điều kiện yêu cầu và điều kiện thực vào hành vi điều chỉnh được thiết kế để làm giảm sai lệch. Những bộ điều khiển loại này dã từng là các hệ thống điều khiển thuỷ lực hoặc các hệ thống khuếch đại thuật toán, tuy nhiên ngày nay hệ thống máy tính đã nhanh chóng thay thế chúng. Thuật ngữ điều khiển số trực tiếp (direct digital control) được sử dụng khi máy tính ở trong vòng lập có phản hồi và thực hiện điều khiển theo cách này.
Quá trình rời rạc (discrete processes) là loại điều khiển các hoạt động nối tiếp. Sự nối tiếp các hoạt dộng có thế trên cư sở - thời gian (clock- based) hoặc trên cơ sử-sư kiện (event- based) hoặc kêi hợp hai loại này. Với hệ thống trên cơ sở-thời gian các hoạt động được thực hiện tại các thời gian cụ thể . Trong một số hệ thống các hoạt động không thực hiện tại thời gian cụ thể mà đáp ứng theo sự kiện. Những hệ thống như vậy được gọi là trên cơ sở -sự kiện. Thời gian đáp ứng xẩy ra dược quyết định bởi quá trình chứ không bởi đồng hồ của hệ thống điều khiển. Có một số hệ thống được gọi là hệ thống tương tác(interactive). Trong những hệ thống này, các mối quan hệ phân định không thật chặt chẽ như trong hệ thống cơ sở -thời gian hoặc cơ sở - sự kiện. Những hệ thống như vậy không đồng bộ hóa chặt chẽ đối với một quá trình bên ngoài, cho đáp ứng đối với tín hiệu lù quá trình nhưng tại một thời gian được xác định bởi hệ thống điều khiển. Thuật ngữ thời gian thực (real time) được sử dụng cho hệ thống điều khiển bằng máy tính trong đó sự trẻ từ thời gian nhập dêh thời gian xuất là đủ nhỏ dể đáp ứng dược chấp nhận là hiệu quả ngay sau khi nhập. Các hệ thống thời gian thực thường chứa một hỗn hợp các hoạt động, một số trong đó được phân loại trên cơ sở- thời gian, một số trên cơ sở -sự kiện và một số tương tác. Hình 3.3 thế hiện sơ đồ khối của hệ thống điều khiển vòng lạp cơ bản.
Thuật ngữ điều khiển khả trình (PLC) được sử dụng cho bộ điều khiển đơn giản trên cơ cử một bộ vi xử lí. Bộ diều khiến này hoạt động trên cơ sở phân tích các tín hiệu từ các sen so và thực hiện các chỉ thị logic đã được lập trình vào trong bộ nhớ của bộ điều khiển. Đầu ra sau xử lí là các tín hiệu được cấp đến bộ kích truyền động hoặc cơ cấu chấp hành. PLC thực hiện tuần tự các hoạt động theo cách đó. Sự khác nhau cơ bân của PLC với máy tính là lập trình của PLC liên quan chính đến logic và các hoạt động đóng/ngắt và giao diện cho thiết bị nhập và thiết bị xuất nằm trong bộ điều khiển.
2 Phương thức điều khiển
Trong một quá trình liên tục, một bộ điều khiển có thể phản ứng đối với một tín hiệu sai lệch theo các cách sau:
2.1 Phương thúc hai bước (two- step mode)
Trong phương thức hai bước thì bộ điểu khiển chính là một công tắc được kích hoạt bởi tín hiệu sai lệch, hành vi điều khiển là đóng-mở (on-off).
Ví dụ về phương thức điều khiển hai bước là bộ ổn định nhiệt bimetal (hình 3.5), được sử dụng trong hệ thống sưởi trung tâm. Đó là cơ cấu đóng/ngắt theo nhiệt độ, nêu nhiệt độ căn phòng cao hơn nhiệt độ yêu cầu dải bimetal sẽ ở vị trí ngắt và bộ nung sẽ ngắt. Nếu nhiệt độ căn phòng rơi xuống nhiệt độ thấp
hơn yêu câu, dải bimetal dịch chuyển đến vị trí đóng và bộ nung lại được đóng.
Như vậy điểu khiển chỉ có ở 2 vị trí đóng-mở.
.png) Theo phương thức này bộ điều khiển chỉ có thể ở vị trí đóng hoặc mở. Hành động điều khiển là không liên tục, kết quả là xảy ra những dao động quanh trạng thái yêu cầu (hình 3.6 thể hiện dao động điều khiển 2 bước). Nguyên đo là có sự trễ trong thời gian đáp ứng của bộ diều khiển và quá trình trao đổi nhiệt. Theo phương thức 2 bước, đầu ra của bộ điều khiển là tín hiệu bật hoặc tắt tương ứng với độ lớn của tín hiệu sai lệch.
Theo phương thức này bộ điều khiển chỉ có thể ở vị trí đóng hoặc mở. Hành động điều khiển là không liên tục, kết quả là xảy ra những dao động quanh trạng thái yêu cầu (hình 3.6 thể hiện dao động điều khiển 2 bước). Nguyên đo là có sự trễ trong thời gian đáp ứng của bộ diều khiển và quá trình trao đổi nhiệt. Theo phương thức 2 bước, đầu ra của bộ điều khiển là tín hiệu bật hoặc tắt tương ứng với độ lớn của tín hiệu sai lệch.
Bộ điều khiển hai bước thường được sử dụng cho các quá trình có sự thay đổi rất chậm, không yêu cầu độ chính xác cao, do vậy được sử dụng trong các bộ điều khiển đơn giản, rẻ.
2.2. Phương thức tỉ lệ (Professional mode-P)
Trong phương thức tỉ lệ bộ diều khiển sinh ra hành động điều khiển tì lệ với sai lệch, nghĩa là độ lớn dấu ra bộ điều khiển tỉ lệ thuận với độ lớn sai lệch. Hình 3.7 thể hiện dầu ra của bộ điều khiển tỉ lệ thay đổi như thế nào với độ lớn và dấu của sai lệch. Mối quan hệ tuyến tính giữa đầu ra bộ điều khiển và sai lệch thường tồn tại chỉ trong một phạm vi nào đó của sai lệch. Phạm vi này gọi là dải tỉ lệ . Trong vùng dải tỉ lệ, phương trình đường thẳng quan hệ có thể biểu diễn:
Thay đổi ở đầu ra bộ điều khiển khởi điểm thiết lập =Kpe
.png) Với: e là sai lệch, Kf, là hằng số, là độ dốc trong hình 3.7. Vì đầu ra bộ điều khiển thường được thể hiên theo % của toàn thang các giá trị cổ thể (ví dụ, trong hình 3.7: 4mA tương ứng với 0% và 20mA tương ứng với 100%); lương tự sai lệch cũng được thể hiện theo phần trãm toàn thang , nên phân trăm (%) thay đổi trong đẩu ra bộ điều khiển khỏi điểm thiết lập là bằng Kp nhân với phần trãm (%) thay đổi trong sai lệch. Như vậy 100% đầu ra bộ điều khiển thì tương ứng với một phần sai lệch bằng dải tỉ lệ:
Với: e là sai lệch, Kf, là hằng số, là độ dốc trong hình 3.7. Vì đầu ra bộ điều khiển thường được thể hiên theo % của toàn thang các giá trị cổ thể (ví dụ, trong hình 3.7: 4mA tương ứng với 0% và 20mA tương ứng với 100%); lương tự sai lệch cũng được thể hiện theo phần trãm toàn thang , nên phân trăm (%) thay đổi trong đẩu ra bộ điều khiển khỏi điểm thiết lập là bằng Kp nhân với phần trãm (%) thay đổi trong sai lệch. Như vậy 100% đầu ra bộ điều khiển thì tương ứng với một phần sai lệch bằng dải tỉ lệ:
.png)
Với I0 là phần trăm đáu ra bộ I khiển tại sai lệch zero, lra là phần trăm đầu ra tai sai lệch e.
Trong vùng dải tỉ lệ, Kp là hàm truyền của bộ điều khiển, lấy từ chuyển đổi Laplace:
Thay đổi ở đầu ra (s) = KPE(s)
Với thay đổi đầu ra (s) là hàm thời gian, E(s) là thay đổi trong tín hiệu saì lệch, cũng là hàm của thời gian.
Hàm truyền =Kp= Thay dối ở đầu ra (s)/E(s)
Trên nguyên tắc này bộ khuếch đại tổng với bộ đảo có thể được sử dụng là bộ diêu khiển tỉ lệ -điện tử (hình 3.8). Đối với một bộ khuếch đại tổng, ta có:
.png)
Với V0 là giá trị diện áp đầu vào qua R1 có sai lệch bằng không, Vc là tín hiệu đầu vào qua R2 có sai lệch, và khi có phản hồi, điện trở phản hồi Rf = R2 khi đó
.png)
Nếu đầu ra từ bộ khuếch đại tổng này truyền qua một bộ đảo, tức một bộ khuếch đại thuật toán với điện trở đường phản hồi bằng điện trừ đầu vào, thì:
.png)
Kết quả là một bộ điều khiển tỉ lệ với Kp là hằng tỉ lệ
Phương thức điều khiển tỉ lệ thường được sử dụng trong quá trình, nơi hàm truyền Kp được sinh đủ lớn để giảm sự hiệu chính (offset) tới một mức chấp nhận được. Tuy nhiên cần chú ý, hàm truyền lớn hơn dổng nghĩa với sự dao động của hệ thống cao hơn vì vậy dễ tạo nên sự không ổn định trong hệ thống.
2.3. Phương thức vi phân (derivative mode-D)
.png) Trong phương thức vi phân bộ điều khiển sinh ra hành động điều chỉnh, tỉ lệ với tốc độ tín hiệu sai lệch thay đổi. Hình 3.9 thể hiện phương thức điểu khiển vi phân.
Trong phương thức vi phân bộ điều khiển sinh ra hành động điều chỉnh, tỉ lệ với tốc độ tín hiệu sai lệch thay đổi. Hình 3.9 thể hiện phương thức điểu khiển vi phân.
Sự thay đổi trong tín hiệu đầu ra bộ điều khiển khỏi giá trị điểm thiết lập tỉ lệ với tốc độ thay đổi theo thời gian của tín hiệu sai lệch và được xác định theo công thức:
.png)
Với: I0, là giá trị đầu ra tại điểm thiết lập; Ira là giá trị đầu ra khi sai lệch e thay đổi với tốc độ de/dt, thường được thể hiện bằng phần trăm trên toàn thang; KD hàng số tỉ lệ và được quy về như thời gian vi phân (vì có đơn vị đo là thời gian).
Một bộ điều khiển vi phân diện tủ được thể hiện ở hình 3.10. Hàm truyền của bộ dicu khiển vi phân thu được tù chuyển đổi Laplace:
.png)
Với: hàm truyền =Kps
Điều khiển tỉ lệ cộng vi phân (PD)
.png) Với điều khiển tỉ lệ cộng vi phân, thay đổi trang đầu ra khỏi điểm thiết lập sẽ là :
Với điều khiển tỉ lệ cộng vi phân, thay đổi trang đầu ra khỏi điểm thiết lập sẽ là :.png)
Vì vậy :.png)
Với I0 là đầu ra tại điểm thiết lập, Ira là đầu ra khi có sai lệch bằng e, Kp là hằng số tỉ lệ, KD là hằng số vi phân, de/dt là tốc độ thay đổi sai lệch.
Như vậy hệ thống có hàm truyền
được cho bởi phương trình:
.png)
Hình 3.11 thể hiện sự thay đổi tín hiệu ra của bộ điều khiển khi có một sai lệch thay đổi liên tục. Đầu tiên có một thay đổi nhanh trong tín hiệu ra do tác động vi phân, tiếp theo là sự thay đổi dốc do hoạt động tỉ lệ. Dạng điều khiển này có thể sử dụng cho các bộ xử lí cho quá trình có sự thay đổi nhanh, tuy vậy một thay đổi trong giá trị thiết lập sẽ yêu cầu một sai lệch bù.
.png)
2.4 Phương thức tích phân (integral mode-1)
Phương thức tích phàn đem lại hành động diều chinh liên tục tăng khi sai lệch vẫn còn. Như vậy ở điều khiển tích phân tốc độ thay đổi của tín hiệu ra bộ điều khiển I là tỉ lệ với tín hiệu sai lệch đầu vào e.
.png)
Ki là hằng số lỉ lệ, có đơn vị đo là s-1 khi đầu ra bộ điều khiển và sai lệch được thể hiện bằng phần trăm (%). Số nghịch đảo của Ki gọi là thời gian tích phân T; (giây). Tích phân công thức trên có:
.png)
I0 là tín hiệu ra bộ điều khiển tại thời gian 0, lra là tín hiệu ra tại thời gian t.
Từ chuyển đổi theo Laplace:.png)
Hàm truyền = K1 /s
.png) Khi sai lệch không thay đổi với thời gian, phương ưình trên trở thành:
Khi sai lệch không thay đổi với thời gian, phương ưình trên trở thành:
Hình 3.12 thể hiện quá trình điều khiển tích phán và hình 3.13 thể hiện mạch sử dụng cho bộ điều khiển tích phần điện tử, bao gồm một bộ khuếch đại thuật toán được nối như bộ tích hợp, tiếp theo là bộ khuếch đại thuật toán khác được nói như bộ gộp để làm tăng thêm tín hiệu ra bộ lích hợp tới giá trị đầu ra của bộ điều khiển tại thời gian zero. K, ở đây bằng 1/R1C.
Điều khiển tỉ lệ cộng tích phân
Điều khiển tích phân thường không đi riêng mà hay được sử dụng nối với điều chỉnh tỉ lệ. Khi hoạt động, bộ tích phán được thêm vào một bộ điều khiển tỉ lệ. đẩu ra bộ điều khiển Ira khi ấy sẽ là:
.png)
Với: Kp là hàng số điều khiển tỉ lệ , K, là hàng số điều khiển tích phân , Ira là-tín hiệu ra khi có sai lệch e và I() là tín hiệu ra tại điểm thiết lập khi sai lệch là 0.
Hình 3.14 thể hiện phản ứng của một hê thống điều khiển tỉ lệ theo tích phân khi có thay đổi đột ngột tới một sai lệch cố định. Sai lệch làm tăng tín hiệu ra của bộ điều khiển tỉ lệ (tín hiệu ra giữ không thay đổi nếu sai lệch không thay đổi). Sự tăng này chồng lên phần tín hiệu ra đo tác động tích phân.
2.5. Phương thức kết hợp PID
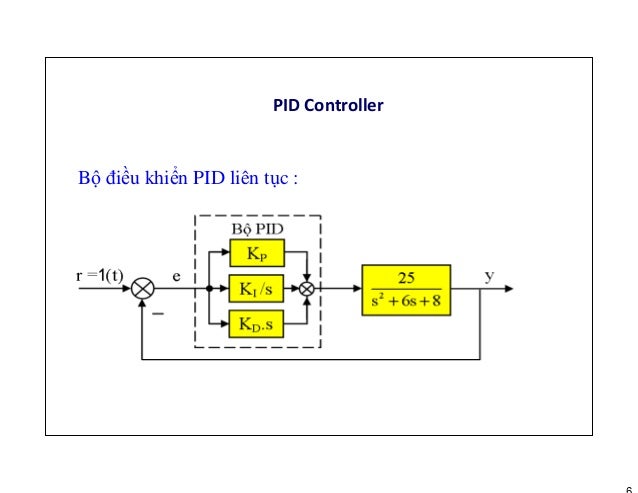
Kết hợp tất cả 3 phương thức điều khiển (tỉ lệ, vi phân, tích phân) de tạo ra bộ điều khiển không có sai lệch bù và giảm các dao động. Bộ điều khiển theo 3 phương thức trên có thể coi như là một bộ điều khiển tỉ lệ điều chỉnh theo tích phân để loại sai số dịch chuyển và điều chỉnh theo vi phán để giảm thời gian trễ.
Bộ điều khiển PDI:
Kết hợp tất cả 3 phương thức điều khiển (tỉ lệ, vi phân, tích phản) tạo ra bộ điều khiển không có sai lệch dịch chuyển và giảm các dao động. Phương trình thể hiện hành động này là:
.png)
Với: Ira là tín hiệu ra khỏi bộ điều khiển khi có một sai lệch e thay đổi với thời gian t, I0 là tín hiệu ra tại điểm thiết lập khi không có sai lệch, Kp là hằng số tỉ lệ , Ki là hằng số tích phân và KD là hằng số đạo hàm.
Từ chuyển đổi Laplace:
Ta có hàm truyền
Trễ (lag)
Hiện tượng trễ có trong tất cả các bộ điểu khiển. Đó là khi có một thay đổi trong trạng thái nhưng bộ điều khiển chưa tạo ra được điều chỉnh đáp ứng ngay, đo hệ thống yêu cầu có thời gian để tạo ra các đáp ứng cần thiết.
Sai lệch ở trạng thái ổn định (steady-state error)
Có thể có sai lệch xẩy ra, đó là kết quả của việc thay đổi biến được điều khiển hoặc một thay đổi trong giá trị đầu vào thiết lập. Khi đó bộ điều khiển sẽ có một sai lệch đầu vào và sẽ sinh ra một đáp ứng, cố gắng giảm sai lệch. Thuật ngữ sai lệch ở trạng thái ổn định (steady-state error) được sử dụng cho sai lệch đầu vào bộ điều khiển đang tồn tại trong các trạng thái ổn định và sẽ mất sau một thời gian ngắn. Đó là độ sai lệch giữa giá trị thiết lập đầu vào và giá trị đầu ra đã được điều khiển. Sai lệch ở trạng thái ổn định là đại lượng thể hiện tính chính xác của hệ thống nhạy đối với sự thay đổi của biến được điều khiển hoặc sự tự hiệu chỉnh giá trị đầu vào thiết lập.
2.6 Điều khiến số trực tiếp
.png)
Hình 3.15 thể hiện cơ sở của một điều khiển số trực tiếp có thể được sử dụng để điều khiển một quá trình liên tục. Các bộ điều khiển trên cơ sở bộ vị xử lí yêu cầu các đầu vào là số, xử lí thông tin dưới dạng số và cho đầu ra dưới đạng số. Do vậy nhiều bộ điều khiển, trước và sau máy tính thường có các bộ chuyển đổi tương tự-số (analogue to- digital converter - ADC) và số -tương tự ((digital - to- analouguc-converter DAC) tương ứng. Một đồng hồ cấp xung tại những khoảng thời gian đều và ra lệnh ADC lấy mẫu các biến được điều khiển. Các mẫu này sau đó được chuyển thành tín hiệu sô' và được bộ vi xử lí so sánh với giá trị điểm thiết lập để cho tín hiệu chênh lệch (tín hiệu sai lệch). Bộ vi xử lí khi đó bắt đầu một phương thức điều khiển để xử lí tín hiệu chênh lệch và đưa ra một đầu ra dạng số. Phương thức điều khiển được bộ vi xử lí sử dụng được quyết định bởi các chỉ lệnh của chương trình, gọi là phần mềm (sofware). Các tín hiệu ra dạng số sau đó thường được xử lí bởi bộ chuyển đổi số-tương tự (DAC) nếu các thành phần kích truyền động yêu cầu các tín hiệu tương tự.
Sử dụng bộ vi xử lí như bộ điều khiển có lợi thế so với các bộ điều khiển tương tự vì mọi phương thức điều chỉnh có thể thay đổi đơn giản bằng thay đổi phần mềm máy tính mà không yêu cầu thay đổi phần cứng hoặc đặt lại hệ thống dây điện. Chiến lược điều khiển có thể thay đổi qua chương trình máy tính trong khi hoạt động điều chỉnh đáp ứng với các tình huống tiến triển.
Điều khiển bằng vi xử lí còn có những lợi thế khác: những quá trình riêng biệt có thể được điều khiển bởi các quá trình lấy mẫu với một bộ đồn (multiplexer). Diều khiển sỗ cho độ chính xác cao hơn, vì các bộ khuếch đại và các thành phần khác được sử đụng trong các hệ thống tương tự thay đổi các đặc tính của nó với thời gian và nhiệt độ nén có hiện tượng trôi, trong khi điều khiển số do hoạt động với tín hiệu chỉ theo phương thức đóng-mở nên không chịu sự trôi nói trên.
Hệ thống điều khiển bằng máy vi tính là hệ thống điều khiển số, thường có các thành phần đặc trưng như trong hình 3.15 với các điểm thiết lập và các tham số điều khiển được nhập vào từ bàn phím. Phần mềm sử dụng cho hệ thống sẽ cung cấp các chỉ lệnh chương trình cần thiết, ví dụ, một máy tính thực hiện phương thức điều khiển PID cung cấp hiến thị - người vận hành (thông tin về điểm thiết lập, giá trị đang đo, vùng lấy mẫu, sai lệch, V...V. ), nhận biết và xử lí các chỉ lệnh đo người vận hành nhập, cung cấp thông tin về hệ thống , chỉ thị khởi động, thoát và cung cấp thông tin về thời gian ngày, tháng.
3 Điều khiển thích nghi
Hệ thống điều khiển thích nghi là một hệ thống điều khiển có khả năng đạt tự động một đáp ứng mong muốn lúc có các thay đổi cực trị ở các tham số hệ thống được diều khiển và các nhiễu ngoài đáng kể khác. Hệ điều khiển thích nghi sử dụng bộ vi xử lí làm bộ điều khiển. Một thiết bị như vậy cho phép sử dụng phương thức và tham số điều khiển thích nghi tương ứng với tình huống, thay đổi chúng khi tình huống thay đổi.
Một hệ thống điêu khiển thích nghi có thể có 3 giai đoạn hoạt động:
- Khởi hoạt động với thiết lập các điều kiện của bộ điều khiển trên cơ sở một điều kiện thừa nhận.
- Thực hiện theo yêu cầu dược so sánh liên tục với thực hiện thực của hệ thống.
- Phương thức hệ thống điều khiển và các tham sô' được tự động hiệu chỉnh liên tục để giảm tối thiểu chênh lệch giữa thực hiện hệ thống thực và yêu cầu.
Các hệ thống điều khiển thích nghi có một số dạng, nhưng thường được sử dụng dưới 3 dạng sau:
- Điều khiển đạt lịch trình.
- Tự điều chỉnh.
- Thích nghi tham chiếu -mẫu.
3.1 Điểu khiển dạt lịch trình (gain-schedule control)
.png) Điều khiển đạt lịch trình còn được gọi là điều khiển thích nghi được lập ưình trước, ở đây các thay đổi được dặt trước trong các tham số của bộ điều khiển trên cơ sở của một số phép do hỗ trợ cho một số biến quá trình, hình 3.16. Trong loại diều khiển này, đại lượng đạt được là tham số gốc đã được thiết lập trước , ví dụ như hằng số tỉ lệ Kp. Nhược điểm của hệ thống này là các tham số điều khiển phải được xác định cho một số điều kiện chức năng, dễ bộ điều khiển có thể chọn một tham số phù hợp với các trạng thái chung. Tuy nhiên ưu điểm của phương pháp này là các tham số có thể thay đổi nhanh khi thay đổi các điều kiện.
Điều khiển đạt lịch trình còn được gọi là điều khiển thích nghi được lập ưình trước, ở đây các thay đổi được dặt trước trong các tham số của bộ điều khiển trên cơ sở của một số phép do hỗ trợ cho một số biến quá trình, hình 3.16. Trong loại diều khiển này, đại lượng đạt được là tham số gốc đã được thiết lập trước , ví dụ như hằng số tỉ lệ Kp. Nhược điểm của hệ thống này là các tham số điều khiển phải được xác định cho một số điều kiện chức năng, dễ bộ điều khiển có thể chọn một tham số phù hợp với các trạng thái chung. Tuy nhiên ưu điểm của phương pháp này là các tham số có thể thay đổi nhanh khi thay đổi các điều kiện.
3.2 Điều khiển tự điều chỉnh (self-tuning control)
.png) Điều khiển tự điều chỉnh là điều hòa liên tục các tham số của nó trên cơ sở giám sát các biến hệ thống đang điều chỉnh và các tín hiệu ra tù bộ điều khiển.
Điều khiển tự điều chỉnh là điều hòa liên tục các tham số của nó trên cơ sở giám sát các biến hệ thống đang điều chỉnh và các tín hiệu ra tù bộ điều khiển.
Hình 3.17. Các bộ điều khiển PID lưu hành trên thị trường hiện nay là loại điều khiển này.
3.3. Hệ thống thích nghi tham chiếu - mẫu (model- reference adaptive systems)
Trong hệ thống thích nghi tham chiếu- mẫu, một hệ thống mẫu chính xác (gọi là mẫu chuẩn) được phát triển. Khi đó giá trị thiết lập được sử dụng như là đầu vào của cả hệ thống thực và hệ thống mẫu . Chênh lệch giữa đầu ra của hai hệ thống này được so sánh và được sử dụng để chỉnh tham số của bộ điều khiển nhằm giảm tối thiểu sự chênh lệch.
Hình 3.18 minh hoạ sơ đổ khối cấu trúc của hệ thống này.
Cơ điện tử, các thành phần cơ bản,TS.Trương Hữu Trí, TS.Võ Thị Ry
Danh mục sản phẩm
-
 Vật tư
1
Vật tư
1
-
Sản phẩm số
212
-
Dịch vụ
30
-
Máy
18
-
Thiết bị
15


Gallery