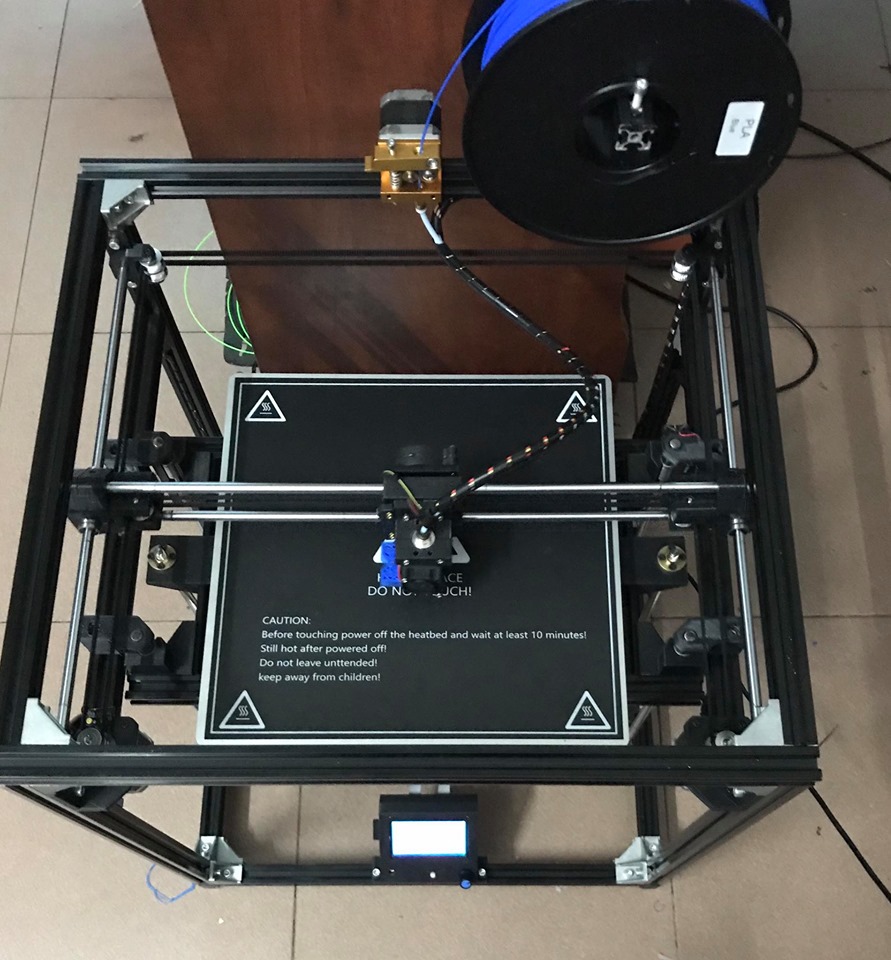
Hướng dẫn ráp máy vẽ trứng Egg Bot
Máy vẽ trứng được ứng dụng để vẽ trên các bề mặt cong, nhất là vẽ đẹp trên quả trứng. Khi bạn cần vẽ các bề mặt khác bạn phải hiệu chỉnh lại code, khá khó. Hoặc bạn thay đổi đầu bút sao cho có độ lên xuống để bám vào bề mặt cần vẽ.
Máy vẽ trứng khá là thú vị, nếu tự làm bạn tốn tầm 800k, nếu mua dĩ nhiên sẽ mắc hơn tầm 1.2 triệu. Việc tự làm hay mua đều đáng hoan nghênh vì giúp bạn hiểu được nguyên tắc làm việc của các máy tự động từ phần cơ khí, phần điện tử, phần lập trình và cuối cùng là cách sử dụng phần mềm để thực thi các tác vụ ( vẽ)
Linh kiện cấu thành: Nơi bán giá rẻ
- 2 bạc đạn 623zz
- Ti ren 3mm dài 80mm length) (không có trên hình
- 1x lò xo (4,5mmx10 mm)
- 2x 1.8deg HIGH QUALITY NEMA 17 Stepper motors ( động cơ bước size 42) (40mm) (4.4Kg/cm torque)
- Cáp nối động cơ (dài 70 cm)
- USB cable (kết nối Arduino)
- 1x SG90 servo
- Mạch Arduino Uno
- Board CNC hoặc board tự thiết kế
- 2 driver A4998
- Power supply 12v/2A
- 2x 6mm M3 Bulon
- 14x 16mm M3 bulon
- 4x M3 đai ốc
- 2x 20mm miếng hút (để cố định quả trứng, không bể)
- 1x M3 đai ốc bướm
- 1x Bút lông
Video hướng dẫn ráp:
1. Sơ đồ ráp tổng quan
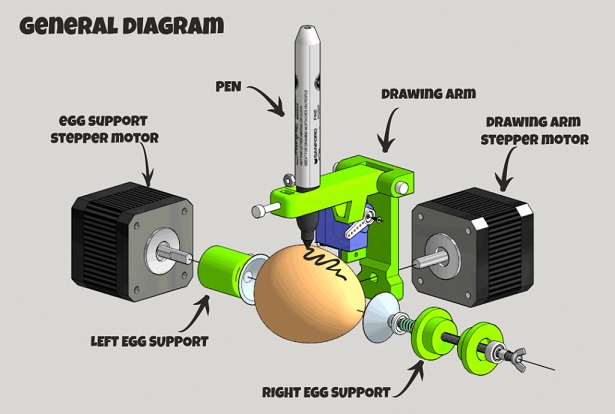
In3d phần khung chính ( File in3d tải ở cuối bài viết)
Không tự in có thể xem dịch vụ in3D giá rẻ: CLick
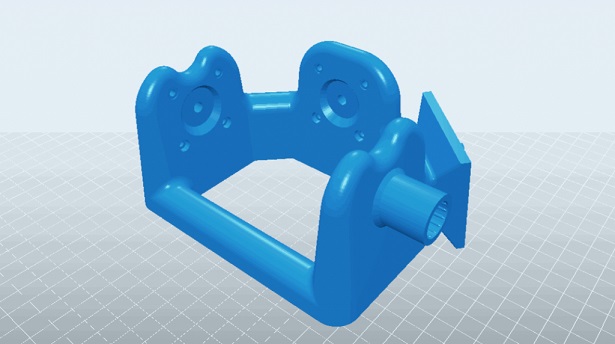
2. In 3d và nối phần cánh tay bên trái
Bắt ốc để gắn servo vào thành nhựa

Đặt đai ốc M3 vào bên trong lỗ và vặn bulon 16mm M3 vào. Tương tự cho phần giữ trứng (phía bên phải của sơ đồ). Phần khớp chó cánh tay vẽ này (drawing ARM) đã được tạo với 2x 16mm M3 . KHớp này có thể quay tự do sau khi gắn 2 bulon 16mm
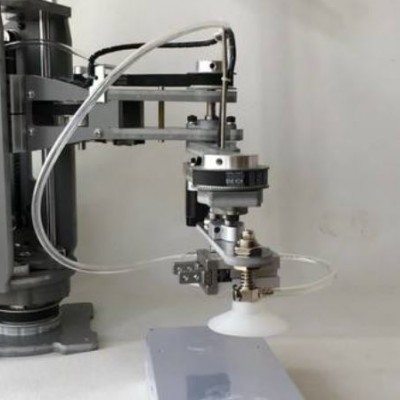
Phần cánh tay vẽ sau khi ráp xong



Đặt núm hút vào phần đở trứng bên phải

3. Cố định động cơ bước 42 và thanh trục X

Cố định cả 2 động cơ trên khung chính dùng 8 con bulon 16mm M3 .

HÌnh trên: Sơ đồ ráp của trục X dùng ti ren M3 dài 80mm. Trình tự đúng
- Núm hút
- đai ốc M3
- Part nhựa in TOP piece
- Lò xo
- Bạc đạn 623
- gắn part nhựa LEFT CAP
- Gắn part nhựa RIGHT CAP
- Vòng nhựa in3d RING
- đai ốc bướm (M3)

Sau khi ráp xong sẽ như hình
4. Các bước gắn tiếp theo


Gắn phần đở bên trái vào trục mô tơ


Sau khi ráp

Phần điện tử.
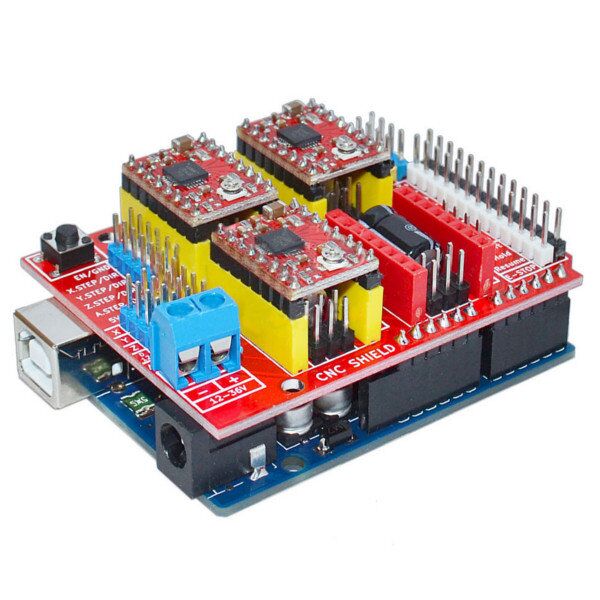
Dùng board CNC shield và Uno + 2 driver A4988

Đây là mạch được thiết kế riêng, điều khiển được qua wifi. Hơi khó nên không giới thiệu
Gắn mạch vào khung dùng 2 bulon M3 6mm


Kết nối dây cho động cơ và servo như sơ đồ

Cuối cùng tải code để napj . CLICK HERE TO DOWNLOAD IT (giải nén và tìm file “Ejjduino_ARDUINO”)
File in3d project: https://www.thingiverse.com/thing:1683764/zip
Nguồn: jjrobots.com
Hướng dẫn sử dụng robot vẽ trứng: Dùng inkscape và plugin đi kèm. Sẽ có bài hướng dẫn sau
Danh mục sản phẩm
-
 Vật tư
1
Vật tư
1
-
Sản phẩm số
212
-
Dịch vụ
30
-
Máy
18
-
Thiết bị
15


Gallery