- Điều khiển mạch kín (Close loop control, feedback control)
.png)
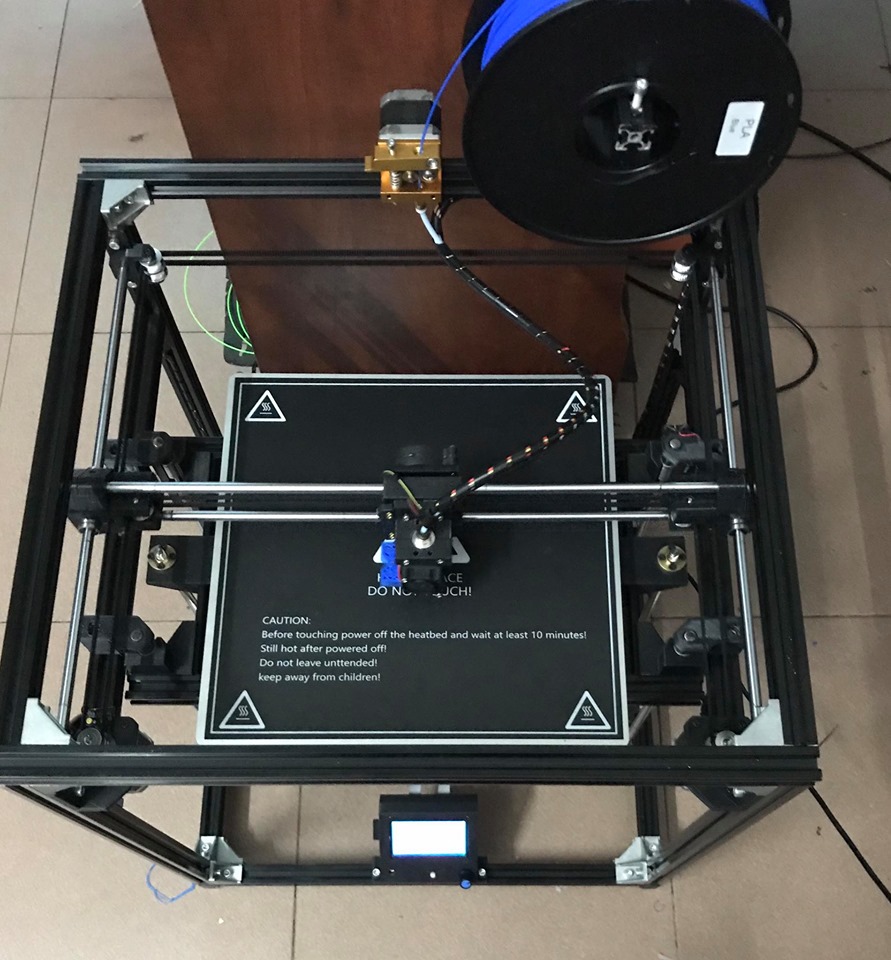
Hình 1-3: Hệ thống điều khiển mạch kín mực nước trong két (h)
So với sơ đồ trong Hình 1-2, hệ điều khiển mạch kín mực nước trong két, Hình 1-3, có thêm bộ phận đo mực nước thực tế (h) trong két, theo nguyên tắc cơ bản là nếu cần phải điều khiển cái gì thì ta phải đo cái đó trước. Từ đó, tín hiệu về mực nước thực trong két được đưa về bộ chế biến tín hiệu để so sánh với giá trị mong muốn về mực nước (hr) trong két. Nếu hr - h > 0, nghĩa là mực nước trong két thấp hơn mong muốn, vậy bộ chế biến tín hiệu sẽ phải gia công ra một tác động điều khiển để mở rộng thêm van cấp nước nhằm duy trì mực nước cao trở lại bằng với giá trị mong muốn. Và ngược lại, nếu hr - h < 0. Vai trò của người điều khiển lúc này chỉ là giám sát quá trình hoạt động, và đặt trước giá trị mực nước mong muốn (hr).
Nguyên lý điều khiển như vừa nêu trên được ứng dụng rất phổ biến trong công nghiệp, vì tính hiệu quả cao, đơn giản, giá thành thấp. Người ta thường gọi hoạt động điều khiển này là có phản hồi (feedback control).
Hệ thống điều khiển mạch kín lý tưởng có thể khử hết được các sai số, giảm nhẹ có hiệu quả các ảnh hưởng của của các lực có thể hoặc không có thể’ phát sinh trong quá trình hoạt động và tạo ra một đáp ứng trong hệ thống phù hợp với mong muốn của người sử dụng. Trong thực tế, không thể có hệ điều khiển lý tưởng như vậy vì có độ trễ trong các phép đo các sai số (độ lệch) và tính không hoàn hảo của các tác động điều khiển.
Các bộ điều khiển mạch kín (feedback controllers) có các ưu điểm sau đây so với các bộ điều khiển mạch hở (feedforward controllers):
- Khử được nhiễu
- Đảm bảo hoạt động được ngay cả khi mô hình điều khiển không chắc chắn, nghĩa là khi cấu trúc của mô hình không hoàn toàn giống với cấu trúc thực của đối tượng được điều khiển và các thông số của mô hình không chính xác.
- Có thể ổn định đối tượng được điều khiển không ổn định
- Giảm tính nhạy đối với các sự thay đổi của các đại lượng thuộc đối tượng được điều khiển.
- Đối tượng được điều khiển (Controlled Process, Plant, Object)
Đối tượng được điều khiển là một máy móc, thiết bị, quá trình, hoặc hệ thống mà nó có một số đại lượng đặc trưng, và các đại lượng đặc trưng này lại cần phải được điều khiển theo ý muốn của con người. Ví dụ như là quá trình thắp sáng một bóng đèn, sưởi nóng một căn phòng, hoặc lái xe trên đường. Đối tượng được điều khiển có thể là một quá trình vật lý, hóa học, cơ học v.v và chúng có thể tồn tại khắp mọi nơi trong vũ trụ.
Ví dụ 1:
Hình 1-3 - đối tượng được điều khiển là két nước, với biến được điều khiển là mức nước (h).
Ví dụ 2:
Đối tượng được điều khiển có thể là một phòng học khi ta muốn điều khiển nhiệt độ trong phòng (T). Xem HÌNH 1-4. Tác động điều khiển là việc hâm nóng phòng khi nhiệt độ trong phòng (T) thấp, làm mát phòng học khi nhiệt độ trong phòng cao hơn mức mong muốn (Tr). Khi đó nhiệt độ trong phòng (T) là một đại lượng đặc trưng trong số nhiều đại lượng trong số nhiều đại lượng đặc trưng cho phòng học, mà nó (nhiệt độ không khí trong phòng, T) cần phải được điều khiển theo ý muốn của chúng ta.
.png)
Hình 1-4: Hệ thống điều khiển tự động nhiệt độ phòng học
- Biến được điều khiển y(t) (Controlled Variable)
Biến được điều khiển [y(t)] là một đại lượng đặc trưng của đối tượng được điều khiển, nó được chọn, được đo và được điều khiển trực tiếp bởi một bộ điều khiển thích hợp.
Ví dụ:
Nhiệt độ không khí trong phòng học (T); Mức nước trong két (h).
Nhiệt độ trong phòng học là một biến được điều khiển, vì nó là một trong những đặc trưng của phòng học, mà người ta lại muốn nhiệt độ trong phòng khá điều hòa, làm cho người ngồi học và người dạy dễ chịu. Tuy nhiên, trong phòng học còn có nhiều đại lượng đặc trưng khác, như số người ngồi học, chất lượng giảng dạy v.v. mà tùy theo nhu cầu cụ thể mà ta có thể chọn thêm một vài đại lượng được điều khiển khác, đương nhiên lại phải có thêm bộ điều khiển phù hợp.
- Bộ điều khiển (Controller)
Bộ điều khiển là một sự kết hơp của các phần tử (không nhất thiết chỉ là cơ khí) có hoạt động cùng nhau để cảm biến giá trị của đại lượng nào đó thuộc đối tượng được điều khiển và đưa ra các tác động để ra lệnh, hướng dẫn, khống chế, điều chỉnh hoặc duy trì giá trị của đại lượng đó.
Một ví dụ đơn giản, bộ điều khiển có thể là một hệ đo tốc độ tàu rồi điều chỉnh công suất tác dụng của động cơ chính để duy trì tốc độ tàu ở giá trị cụ thể nào đó mà ta định trước.
Bộ điều khiển tương tác với quá trình (đối tượng được điều khiển) theo hai cách. Thứ nhất là nó đo đạc và đánh giá biến nào đó của quá trình. Thứ hai, nó làm thay đổi một hoặc vài biến của quá trình, của đối tượng được điều khiển.
- Phần tử đo, cảm biến (Measuring element, sensor):
Phần tử đo, cảm biến là thiết bị dùng để cảm nhận (đo đạc) giá trị của biến được điều khiển y(t) và biến đổi giá trị đó thành tín hiệu chuẩn c(t) để có thể dùng được ở các bộ phận tiếp theo của bộ điều khiển. Thông thường, tín hiệu này c(t) được gửi tới phần tử so sánh, để so sánh với giá trị cho trước (r ) nhằm tạo ra độ lệch e(t).
Ví dụ: Hộp keo kín hình trụ, có đáy và thành trụ rất cứng vững, nhưng có mặt đỉnh trụ là một màng kim loại có nếp gợn sóng. Nhiệt độ hộp keo tăng sẽ làm mặt đỉnh hình trụ này lồi lên trên. Mức lồi lên này (nhiều hay ít) chính là tín hiệu về nhiệt độ và nó tỷ lệ với mức tăng nhiệt độ hộp keo.
Điều khiển tự động, Bùi Hồng Dương
Danh mục sản phẩm
-
 Vật tư
1
Vật tư
1
-
Sản phẩm số
212
-
Dịch vụ
30
-
Máy
18
-
Thiết bị
15
Sản phẩm nổi bật

Máy khắc laser mini D3040
6,490,000₫

Gallery