HỆ THỐNG ĐIỀU KHIỂN
1 Tổng quan
Nhiệt độ cơ thể con người, trừ khi ốm, thường được giữ ổn định cho dù bạn ở trong môi trường nóng hoặc lạnh. Để giữ nhiệt độ cố định, trong cơ thể chúng ta có một hệ thống điều khiển nó. Nếu như nhiệt độ cơ thể bạn bắt đầu cao hơn bình thường, bạn đổ mồ hôi, nếu hạ thấp, bạn sẽ run. Cả hai phản ứng đó đều được sử dụng để khôi phục cơ thể trở về nhiệt độ bình thường. Hệ thống điều khiển trong cơ thể con người cố gắng giữ nhiệt độ cố định.
Một kiểu điều khiển nhiệt độ sưởi ấm ngôi nhà bạn là bạn ngồi cạnh lò sưởi với nhiệt kế trong tay và tắt, bật lò sưởi theo nhiệt kế đo được. Đó là một kiểu điều khiển phản hồi (feedback) đơn sơ, sử dụng con người như là một yếu tố điều khiển. Thuật ngữ phản hồi được sử dụng vì tín hiệu từ đầu ra được cung cấp lại để thay đổi đầu vào.
Hệ thống điều khiển phản hồi có thể gặp ở khắp nơi, không chỉ trong tự nhiên, ưong cuộc sông mà cả trong công nghiệp. Có rất nhiều quy trình công nghiệp và thiết bị cần có sự điều khiển, can thiệp của con người hoặc được điều khiển tự động. Ví dụ đó là những quá trình điều khiển giữ ổn định nhiệt độ, mực chất lỏng, áp suất, V...V. Trong công nghiệp hoá chất có lúc cần thiết phải giữ mực của chất lỏng trong thùng chứa tại mức chỉ định hoặc nhiệt độ cụ thể nào đó. Cũng có những hệ thống điều khiển vị trí chính xác, chuẩn mực của thành phần đang chuyển động hoặc giữ một tốc độ cố định. Ví dụ như một động cơ được thiết kẻ chạy với tốc độ cố định hoặc một nguyên công mà vị trí, tốc độ và hướng vận hành của dụng cụ được điều khiển tự động.
1.1 Các hệ thống điều khiển mở và hệ thống có phản hồi

.png) Hệ thống điều khiển có hai dạng cơ bản, một gọi là hệ đóng (hệ có phản hồi hoặc còn gọi là hệ vòng lặp) và một gọi là hệ mà. Sự khác nhau giữa hai hệ thống có thể minh hoạ qua ví dụ sau: một lò sưởi điện có công tác chuyển mạch cho phép chọn phần tử nung nóng 1 kW hoặc 2 kW. Một người muốn sưởi căn phòng có thể vặn 1 kW nếu như không yêu cầu căn phòng quá nóng. Cãn phòng nóng dần và đạt đến một nhiệt độ với công suất đặt trước là 1 kW (chứ không phải 2 kW). Nếu như ai đó mở cửa sổ. nhiệt độ trong phòng sẽ hạ vì không có sự chỉnh lại nhiệt độ. Đó là hệ thống mở (hình 3. ]), ở đây không có thông tin phản hồi để điều chỉnh và giữ nhiệt độ không đổi. Hộ thống này có thể chỉnh lại thành hệ thống vòng đóng nếu như có nhiệt kê' theo dõi và có các công tắc có thể tắt/ bạt thành phần 1 kw và 2 kW theo chênh lệch giữa nhiệt độ yêu cầu và nhiệt độ thực, giữ nhiệt độ cãn phòng cố định. Trường hợp này đã có phản hồi (feedback), đầu vào hệ thống đã được điều chỉnh phù hợp theo nhiệt độ yêu cầu của đầu ra .Điều đó có nghĩa, đầu vào tại công tắc phụ thuộc vào chênh lệch của nhiệt độ thực so với nhiệt độ yêu cầu. Sự chênh lệch giữa chúng được thành phần so sánh, trong trường hợp này là con người xác định .
Hệ thống điều khiển có hai dạng cơ bản, một gọi là hệ đóng (hệ có phản hồi hoặc còn gọi là hệ vòng lặp) và một gọi là hệ mà. Sự khác nhau giữa hai hệ thống có thể minh hoạ qua ví dụ sau: một lò sưởi điện có công tác chuyển mạch cho phép chọn phần tử nung nóng 1 kW hoặc 2 kW. Một người muốn sưởi căn phòng có thể vặn 1 kW nếu như không yêu cầu căn phòng quá nóng. Cãn phòng nóng dần và đạt đến một nhiệt độ với công suất đặt trước là 1 kW (chứ không phải 2 kW). Nếu như ai đó mở cửa sổ. nhiệt độ trong phòng sẽ hạ vì không có sự chỉnh lại nhiệt độ. Đó là hệ thống mở (hình 3. ]), ở đây không có thông tin phản hồi để điều chỉnh và giữ nhiệt độ không đổi. Hộ thống này có thể chỉnh lại thành hệ thống vòng đóng nếu như có nhiệt kê' theo dõi và có các công tắc có thể tắt/ bạt thành phần 1 kw và 2 kW theo chênh lệch giữa nhiệt độ yêu cầu và nhiệt độ thực, giữ nhiệt độ cãn phòng cố định. Trường hợp này đã có phản hồi (feedback), đầu vào hệ thống đã được điều chỉnh phù hợp theo nhiệt độ yêu cầu của đầu ra .Điều đó có nghĩa, đầu vào tại công tắc phụ thuộc vào chênh lệch của nhiệt độ thực so với nhiệt độ yêu cầu. Sự chênh lệch giữa chúng được thành phần so sánh, trong trường hợp này là con người xác định .
Vẫn là ví dụ về sưởi căn phòng, nhưng được làm ấm đến nhiệt độ đặt trước thông qua một bộ ổn định nhiệt (hình 3.2). Bộ ổn định nhiệt điều khiển van khí nóng mở, dòng khí nóng qua lò sưởi, làm ấm căn phòng tới nhiệt độ đặt. Tại nhiệt độ này van được đóng lại (lò sưởi đóng) cho đến khi phòng văn còn giữ được tại nhiệt độ này. Khi có sự hạ nhiệt, sự chênh lệch sẽ được gửi đến bộ ổn nhiệt để tạo thành tín hiệu vào, bật van thông khí vào lò sưởi để làm ấm căn phòng đến nhiệt độ đặt. Hệ điều khiển này là điều khiển vòng lặp (có phản hồi).
.png)
Hệ thống mở có lợi thế so với hệ thống đóng là kết cấu tương đối đơn giản, theo đó là giá thấp và thường có độ bền tốt và đáng tin cậy. Tuy nhiên chúng cũng thiếu chính xác hơn đo không có thành phần hiệu chỉnh cho sai lệch. Một hệ thống vòng đóng có lợi thế vì tương đối chính xác phù hợp với giá trị thực yêu cầu. Tuy nhiên chúng lại thường có kết cấu phức tạp, đất giá hơn và dễ hỏng do là tập hợp của nhiều thành phần.
1.2 Các thành phần cư bản của một hệ thống điều khiển có phản hồi (đóng)
Hình 3.3 thể hiện sơ đồ chung của một hệ thống đóng, thường bao gồm các thành phần sau:
- Phần tử so sánh (comparision) so sánh giá trị yêu cầu (tức giá trị chuẩn) trong điều kiện thay đổi đang được điều khiển với giá trị đo đạt được và sinh một tín hiệu sai lệch. Tín hiệu sai lệch là đại lượng bổ sung vào tín hiệu chuẩn. "Tín hiện sai lệch = Tín hiệu giá trị chuẩn - tín hiệu giá trị đo" .Thuật ngữ vòng phản hồi (feedback loop) có nghĩa là ở đó một tín hiệu đáng đạt trạng thái thực được cấp quay lại để thay đổi tín hiệu đầu vào của một quá trình, phản hồi gọi là hồi tiếp âm (negative feedback) khi tại phần tử so sánh nó được trừ khỏi tín hiệu vào và hồi tiếp dương khi được tín hiệu vào cộng với.
.png)
- Phần tử điều khiển (control element) là thành phần đưa quyết định tác động khi nó nhận được một tín hiệu sai lệch, ví dụ, sinh tín hiệu để đóng/ngắt một công tắc hoặc để mở một van. Sơ đồ điều khiển có thể là hệ gắn cứng (hard-wired systems), trong đó cách tiến hành điều khiển luôn cố định theo cách các phần tử được kết nối với nhau hoặc là hệ thống khả lập trình (programmable systems), ở đó dự kiến điều khiển được lưu trong một bộ nhớ và có thể thay đổi bằng cách lập chương trình lại.
- Phần tử hiệu chỉnh (correction element) là phần tử tạo ra một thay đổi trong quá trình để hiệu chỉnh hoặc thay đổi trạng thái được diều khiển. Thuật ngữ cơ cấu kích truyền động (actuator) được sử dụng cho phần tử của bộ hiệu chỉnh, phần lử cáp nâng lượng dể thực hiện hành dộng điều khiển.
- Yếu tố quá trình (process element) là những gì đang được kiểm soát, ví dụ là một căn phòng trong một ngôi nhà mà nhiệt dô của nó được kiểm soát, hoặc một bể chứa mà mực nước của nó đang được kiểm soát, hoặc một diễn biến đang được thực hiện dưới sự giám sát của hệ điều khiển.
- Phần tử đo (measurement element) sinh ra một tín hiệu liên quan tới trạng thái thay đổi của một quá trình đang được điều khiển. Ví dụ, một công tắc dược bật khi một vị trí cụ thể đạt được hoặc một cập nhiệt điện cho một suất điện động (e.m.f.) tương ứng với một nhiệt độ thiết lập trước.
Nhiễu (disturbance) là những yếu tố bên ngoài ảnh hưởng đến hoạt động của thiết bị.
Tín hiệu vào (input) còn gọi là tín hiệu chuẩn, đó là các giá trị mong muốn của tác biến điều khiển được sinh bởi thiết bị.
Tín hiệu ra (output) là biến đang được kiểm soát, ví dụ là nhiệt độ thực của cản phòng.
Như vậy đối với một hệ thống điều khiển nhiệt độ có phản hồi, được thể hiện ở hình 3.2, có các phần tử sau:
- Đầu ra (biến đang dược kiểm soát): nhiệt độ căn phòng.
- Đầu vào (giá trị chuẩn): nhiệt độ yêu cầu cho căn phòng.
- Phần tủ so sánh: sensor thuộc bộ ổn định nhiệt.
- Tín hiệu sai lệch: chênh lệch giữa giá trị thực và giá trị yêu cầu.
- Phần tử điểu khiển: bộ ổn định nhiệt.
- Phần tử điều chỉnh: van khí.
- Quá trình: sưởi cản phòng.
2 Hệ điều khiển tuần tự
![Tìm hiểu] Vi xử lý - Vi điều khiển - So sánh sự khác nhau](https://huphaco.vn/wp-content/uploads/2020/04/vi-xu-ly-la-gi.jpg) Trong một số trường hợp, bộ điều khiển thi hành những hạng mục được đóng/mở tại những thời điểm đặt trước hoặc những giá trị liên quan tuần tự đến cấc bước vận hành. Sau khi bước 1 hoàn thiện, thì bước 2 bắt đầu, khi bước 2 hoàn thiện bước 3 bắt dầu. Thuật ngữ diều khiển tuần tự được sử dụng khi điều khiển quá trình có những hoạt động tuyệt đối theo thứ tự trong một chuỗi thời gian. Việc này có the thực hiện bằng cách dặt các rơle. Các công tắc cơ khí như vậy ngày càng được thay thế bầng các bộ vi xử lí (microprocessors), loại có thể hoạt động tương tự nhưng có khả năng lập trình bởi người sử dụng.
Trong một số trường hợp, bộ điều khiển thi hành những hạng mục được đóng/mở tại những thời điểm đặt trước hoặc những giá trị liên quan tuần tự đến cấc bước vận hành. Sau khi bước 1 hoàn thiện, thì bước 2 bắt đầu, khi bước 2 hoàn thiện bước 3 bắt dầu. Thuật ngữ diều khiển tuần tự được sử dụng khi điều khiển quá trình có những hoạt động tuyệt đối theo thứ tự trong một chuỗi thời gian. Việc này có the thực hiện bằng cách dặt các rơle. Các công tắc cơ khí như vậy ngày càng được thay thế bầng các bộ vi xử lí (microprocessors), loại có thể hoạt động tương tự nhưng có khả năng lập trình bởi người sử dụng.
Ví dụ về loại điều khiển như vậy là loại trong máy giặt. Máy giặt thực hiện một loạt nguyên công theo đúng thứ tự thời gian, gồm một chương trình về chu kì giặt sơ bộ, khi quẩn áo được giặt nước lạnh. Tiếp theo là chu kì giặt chính trong nước nóng, sau đó là chu kì rũ quần áo trong nước lạnh vài lần, sau đó vắt nước. Mỗi một nguyên công bao gồm một số bước chẳng hạn như chu kì giặt sơ bộ gồm mở van để nước chảy vào đến mức định san, đóng van, mở động cơ trong đổ quay trống theo một thời gian quy định và rút nước khỏi trống. Tuần tự hoạt động của hệ thống được gọi là chương trình và sẽ có một so chương trình có thể được chọn, phụ thuộc vào loại quần áo được giạt trong máy. Tuần tự chỉ thị trong mỗi chương trình được xác định và xây đựng trước, nằm trong bộ điều khiển.
2.1 Điều khiển trên cơ sở bộ vi xử lí.
.png) Bộ vi xử lí ngày nay thay thế nhanh chóng các bộ điểu khiển cơ hoạt động theo nguyên tắc cam để thực hiện các chức nãng điều khiển. Chúng có lợi thế rất lớn vì chỉ thay đổi chương trình là có thể thay đổi cách điểu khiển. Thuật ngữ bộ điều khiển khả trình (programmable logic controller) để chỉ các bộ điều khiển trên cơ sở bộ vi xử lí, sử dụng bộ nhớ lập trình để lưu các hướng dẫn và dể thực hiện các chức năng logic, trình tự, đếm thời gian và số học để điều khiển các sự kiện. Hình 3.4 thể hiện hành động điều khiển của bộ điều khiển khả trình (programmable logic controller), dầu vào là những tín hiệu từ các công tắc đang dược đóng, chương trình sử dụng để quyết định đáp ứng đối với đầu vào của bộ điều khiển và cho tín hiệu đầu ra.
Bộ vi xử lí ngày nay thay thế nhanh chóng các bộ điểu khiển cơ hoạt động theo nguyên tắc cam để thực hiện các chức nãng điều khiển. Chúng có lợi thế rất lớn vì chỉ thay đổi chương trình là có thể thay đổi cách điểu khiển. Thuật ngữ bộ điều khiển khả trình (programmable logic controller) để chỉ các bộ điều khiển trên cơ sở bộ vi xử lí, sử dụng bộ nhớ lập trình để lưu các hướng dẫn và dể thực hiện các chức năng logic, trình tự, đếm thời gian và số học để điều khiển các sự kiện. Hình 3.4 thể hiện hành động điều khiển của bộ điều khiển khả trình (programmable logic controller), dầu vào là những tín hiệu từ các công tắc đang dược đóng, chương trình sử dụng để quyết định đáp ứng đối với đầu vào của bộ điều khiển và cho tín hiệu đầu ra.
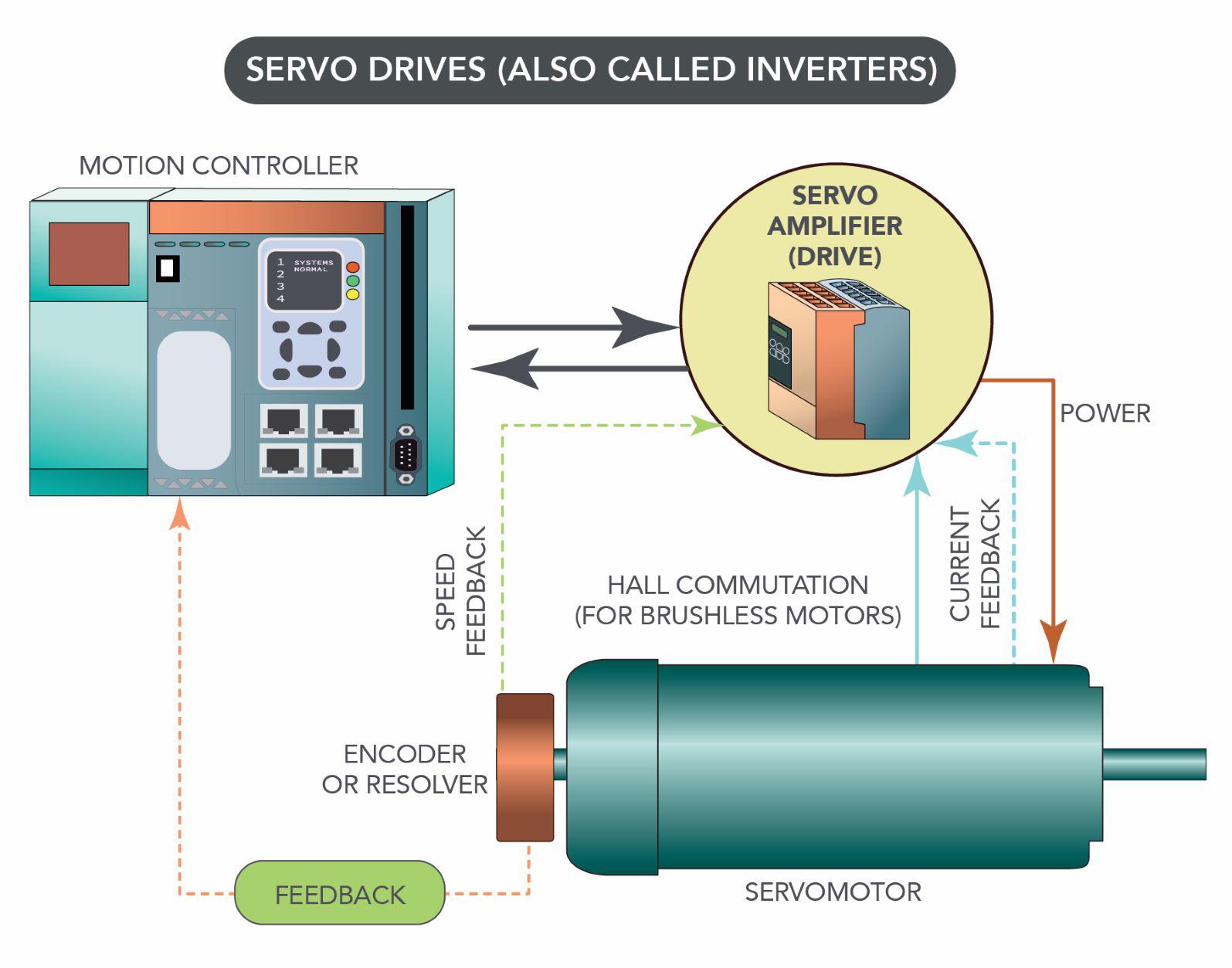
Bộ điều khiển PDI, điều khiển vòng lặp xác định chênh lệch trạng thái thực và trạng thái yêu cầu, đưa ra một lệnh điều chỉnh để loại bỏ chênh lệch ấy, Điều khiển số (numerical controller), dạng điều khiển sử dụng xử lí với toán học dấu phẩy cố định (Fixed- Point Mathematics) cũng đều là các bộ điều khiển trên cơ sở vi xử lí.
2.2 Điều khiển số và các cổng logic (digital congtrol and logic gates)
Điều khiển tương tự (analogue control) là điều khiển liên tục với tín hiệu đầu vào từ các cảm biến và đầu ra tới cơ cấu kích truyền động (actuator) đang được thay đổi liên lực. Các cơ cấu kích động bản thân cũng có thể là những biến liên tục ví dụ như là van hoặc là những cóng tắc bật/ tắt đơn sơ. Tuy nhiên nhiều hệ thống điều khiển lại hoạt động với tín hiệu số, chỉ có khả năng thể hiện ở 2 mức đó là bật/tắt. đóng/mở, vâng/không, dúng/sai hoặc+5V/0V, V...V. Hai mức này có thể thế hiện bằng số nhị phân với trạng thái: bật, mở, vâng , đúng và +5V biểu hiện bởi 1 và tắt, đóng, không, sai và 0V thể hiện bởi 0 , Đó là đại số Boolean.
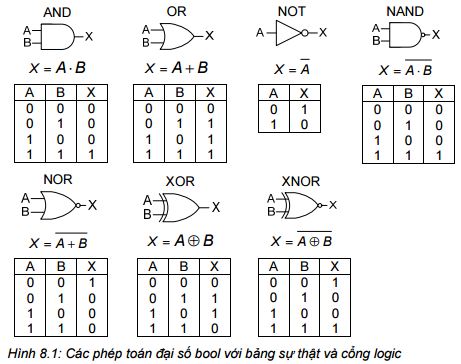
Điều khiển số là điều khiển không liên lục , ví dụ, nước vào máy giặt chỉ khi cửa máy đã đóng và sau một thời gian cụ thể trong chu kì giặt đã đạt. Như vậy có hai tín hiệu đầu vào là yes, hoặc no và một tín hiệu ra là chỉ yes hoặc chỉ no. ớ dây bộ điều khiển được lập trình cho một tín hiệu ra yes chỉ khi cả hai tín hiệu đầu vào là yes, nghĩa là nếu đấu vào A và dầu vào B đều là 1 thì tín hiệu đầu ra là 1. Một điều khiển như vậy dược gọi là điểu khiến bởi cổng logic. Và ví dụ trên là cổng AND. Có rất nhiều thiết bị và quy trình được điều khiển theo cách này.
Cổng logic: mối quan hệ giữa đầu vào và đầu ra thường được thể hiện dưới dạng bảng ở hình 3.22. Bảng này thể hiện mối quan hệ giữa đầu vào và đầu ra (xem mục 3.4).

Cơ điện tử, các thành phần cơ bản,TS.Trương Hữu Trí, TS.Võ Thị Ry
Danh mục sản phẩm
-
 Vật tư
1
Vật tư
1
-
Sản phẩm số
212
-
Dịch vụ
30
-
Máy
18
-
Thiết bị
15


Gallery