Hướng dẫn làm xe robot tự cân bằng dùng động cơ bước
Để có thể tìm hiểu được nguyên lý hoạt động của cảm biến MPU 6050, một loại Module cảm biến gia tốc tích hợp gia tốc 3 trục + con quay hồi chuyển 3 trục giúp kiểm soát cân bằng hoặc định hướng chuyển động cho robot, máy bay, tay cầm chơi game, hệ thống giữ thăng bằng cho camera/máy ảnh, nhận biết sự rơi, rung, lắc,… truyền dữ liệu về cho trung tâm điều khiển ( hồi tiếp ) để trung tâm điều khiển xuất ra các lệnh giúp robot có thể cân bằng trong tình trạng trên.

Một phần đáng lưu ý trong việc chế tạo robot cân bằng là PID, chúng ta sẽ được hiểu thêm về PID (P phụ thuộc vào sai số hiện tại, I phụ thuộc vào tích lũy các sai số quá khứ, và D dự đoán các sai số tương lai, dựa vào tốc độ thay đổi hiện tại ) Bằng cách điều chỉnh 3 hằng số trong giải thuật của bộ điều khiển PID, bộ điều khiển có thể dùng trong những thiết kế có yêu cầu đặc biệt. Đáp ứng của bộ điều khiển có thể được mô tả dưới dạng độ nhạy sai số của bộ điều khiển, giá trị mà bộ điều khiển vọt lố điểm đặt và giá trị dao động của hệ thống. Lưu ý là công dụng của giải thuật PID trong điều khiển không đảm bảo tính tối ưu hoặc ổn định cho hệ thống.
Chúng ta đi vào phần lắp ráp:
Đầu tiên các bạn cần chuẩn bị các linh kiện:
- Arduino nano hoặc Arduino pro mini x 1 cái.
- Mini DC 7-28V đến DC 5V 2A cho Step x 1 cái.
- MPU 6050 x 1 cái.

- Driver điều khiển động cơ bước DRV8825 hoặc A4988 x 2 cái.
- Động cơ bước x 2 cái.

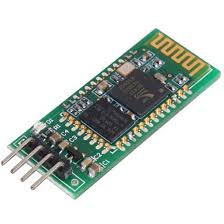
- Module bluetooth HC 06 x 1 cái.
- Bánh xe cho động cơ bước x 2 cái.
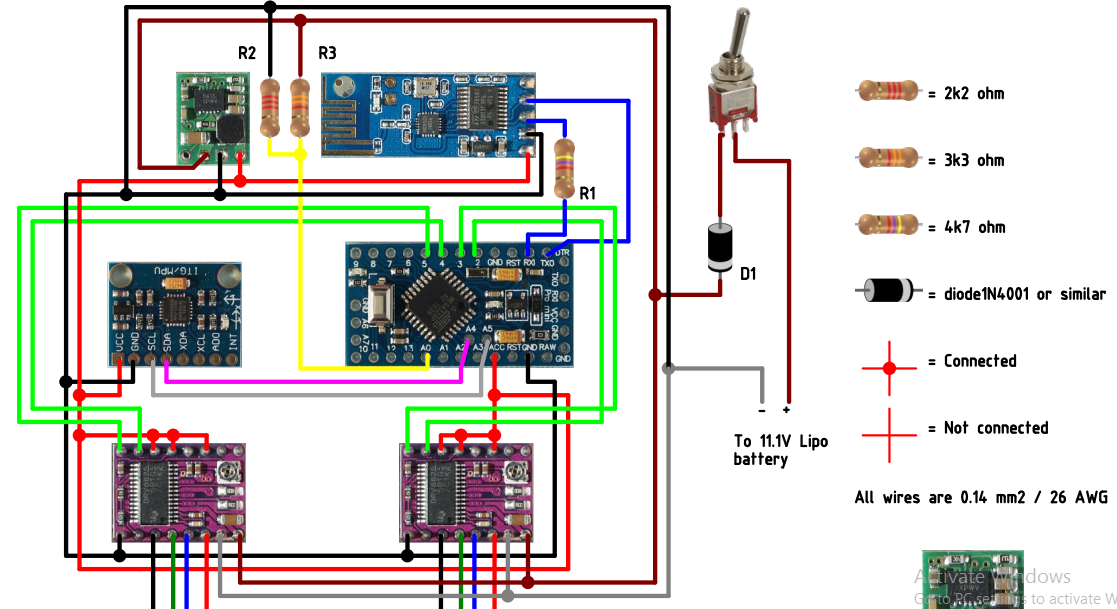
Các bạn kết nối theo sơ đồ sau:
Phần khung các bạn có thể tự thiết kế theo ý mình thích. Hoặc tham khảo dưới này:
Link khung và bánh xe:
https://vietmachine.com.vn/608/bo-khung-nhua-cho-xe-2-banh-tu-can-bang
Video hướng dẫn chi tiết:
Trọn bộ file dự án:
https://www.thingiverse.com/thing:1069256
Danh mục sản phẩm
-
 Vật tư
1
Vật tư
1
-
Sản phẩm số
212
-
Dịch vụ
30
-
Máy
18
-
Thiết bị
15


Gallery