1 Khái niệm chung
Xử lý tín hiệu là các công việc mà ta tiến hành với tín hiệu nhằm biến đổi chúng về các dạng nhất định thích hợp với hoạt động của các phần tử khác trong hệ điều khiển. Nếu các tín hiệu này được chế biến theo luật tương tự, ta gọi công việc này là xử lý tín hiệu tương tự. Nếu công việc chế biến tín hiệu tuân theo luật số hóa, ta gọi đó là xử lý tín hiệu số hóa.
Chương này sẽ giới thiệu khái quát một số kỹ thuật xử lý tín hiệu tương tự dùng trong các hệ thống điều khiển. Sau khi xem xét chương này, bạn sẽ có được một số kiến thức về:
- Mạch cầu Wheatstone và các ứng dụng của nó trong việc đo điện trở, điện dung.
- Ứng dụng mạch cầu Wheatstone trong đo lường.
- Phân tích nguyên lý cơ bản của bộ khuếch đại thuật toán, ứng dụng bộ khuếch đại thuật toán trong việc xây dựng các mạch điều khiển, chế biến tín hiệu thông dụng...
2 Các nguyên lý chế biến tín hiệu tương tự.

Thiết bị cảm ứng đo lường một biến bằng cáh chuyển đổi thông tin về biến đó thành thành một tín hiệu phụ thuộc trong môi trường điện, khí nén, thuỷ lực v.v. Những bộ biến đổi này lợi dụng những quy luật, hiện tượng có sẵn trong tự nhiên. Công việc chế biến tín hiệu còn biến đổi tín hiệu ra từ các phần tử cảm biến thành các tín hiệu thích hợp, cả về dải giá trị lẫn môi chất truyền tin, để giao diện tốt với các phần tử còn lại trong hệ thống.
Trong các phần trước ta cũng đã xem xét một số phần tử chế biến tín hiệu gió nén, thuỷ lực... Trong phần này ta sẽ tập trung vào các hình thức chuyển đổi tín hiệu điện. Ngoài ra mỗi thiết bị xử lý tín hiệu này chính là một phần tử cũng có hàm truyền đạt thể hiện sự liên hệ giữa tín hiệu ra với tín hiệu vào của nó. Thông thường các quá trình này cũng sẽ được tuyến tính hoá, hoặc ngay trong quá trình thiết lập chúng, người ta cũng đã chú trọng lựa chọn các quá trình có các quan hệ vào - ra gần tuyến tính rồi.
Ta có thể phân nhóm các thiết bị chế biến tín hiệu thành một số nhóm chung như sau.
2.1 Thay đổi cường độ tín hiệu
Ví dụ phổ biến nhất là khuếch đại hay giảm khuếch đại cường độ tín hiệu. Ngoài ra, việc phối hợp trở kháng, đặc tính thay đổi tín hiệu theo tải, đáp ứng tần số của thiết bị cũng là những yếu tố cần xem xét trong quá trình chuyển đổi này.
2.2 Tuyến tính hóa
Nhà thiết kế các mạch điều khiển có rất ít các lựa chọn tuyến tính giữa đầu vào - ra của các biến. Hầu hết các quá trình chuyển đổi tín hiệu đều không tuyến tính. Ngay cả khi ta đã tuyến tính hoá chúng, chúng cũng chỉ tuyến tính trong một giải giá trị nhất định. Cách thức tuyến tính hoá hiệu quả nhất là chuyển tín hiệu đo được vào máy tính rồi sử dụng các phần mềm để chuyển đổi tín hiệu.
2.3 Chuyển đổi dạng tín hiệu
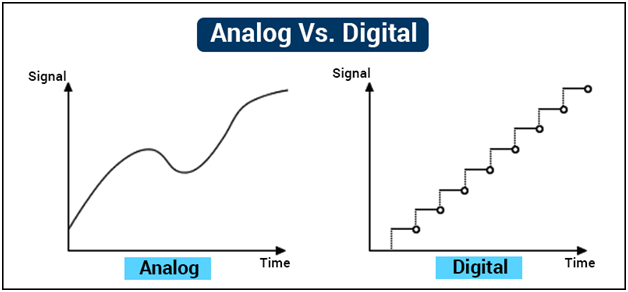
Do nhu cầu, ta có thể phải chuyển đổi tín hiệu từ dạng điện sang khí nén, thuỷ lực, lực, chuyển vị và ngược lại. Ngoài ra ngay trong cùng một môi trường truyền dẫn, ta cũng còn cần phải chuyển đổi dạng tín hiệu. Ví dụ, ta cần chuyển đổi điện áp thành dòng điện để truyền tín hiệu đi xa, rồi ở đầu nhận ta lại chuyển đổi tín hiệu dòng trở về điện áp để điều khiển. Lý do là điện áp phụ thuộc nhiều vào tải, còn dòng điện thì không, tuy nhiên dòng điện dễ bị khử đi do các hiện tượng đấu tắt (chạm mát). Việc chuyển đổi tín hiệu số-tương tự và tương tự-số cũng rất cần thiết trong các giao diện với máy tính trong điều khiển hiện đại.
2.4 Lọc và phối hợp trở kháng
Các tín hiệu nhiễu như tần số lưới, các quá trình đóng ngắt các thiết bị ... cũng có tác động không mong muốn đáng kể đến các quá trình điều khiển. Do vậy cần đến các bộ lọc thông thấp hay thông cao để khử nhiễu. Ngoài ra, việc phối hợp trở kháng giúp cho các tín hiệu vào, ra các thiết bị được chuyển đổi chính xác hơn.
2.5 Khái niệm nạp tải
Có một điểm cần đặc biệt lưu ý khi phân tích các mạch tương tự là hiện tượng nạp tải của một mạch điện bởi một mạch khác, khi đó nó tạo ra các lượng không chắc trong phép đo và xử lý tín hiệu. Ví dụ cụ thể là nếu ta có một mạch hởlà một nguồn điện áp, khi đó nó có một điện áp, chẳng hạn là Vx. Mạch hở là một mạch mà không có gì nối vào giữa hai đầu cực ra của mạch. Khi ta đấu một điện trở Rl vào hai đầu ra của nguồn hở, nguồn này trở thành mạch kín, điện áp tại hai đầu nguồn sụt xuống một lượng, còn là Vy, Vy < Vx. Giá trị điện trở Rl khác nhau cho ta các lượng sụt áp khác nhau.
Khi phân tích các hiệu ứng nạp tải, người ta thường ứng dụng định lý Thévenin. Định lý này phát biểu rằng giữa hai cực ra của bất kỳ phần tử nào cũng có thể được xem như là một đoạn mạch tương đương gồm một nguồn điện áp được mắc nối tiếp với một trở kháng ra tương đương. Đoạn mạch như vậy thường được gọi là mạch Thévenin tương đương Hình 4-1 là một ví dụ cụ thể khi tính hiện tượng nạp tải. Giả sử ta có một phần tử có đầu vào là x, cho ra tín hiệu ra là điện áp Vx, và ta sẽ nối một điện trở Rl vào hai cực ra của mạch này. Khi đó, đoạn mạch này được biến đổi Thevenin như là gồm một nguồn điện Vxmắc nối tiếp với điện trở tương đương Rx (trở kháng ra). Khi điện trở ngoài Rl (tải) được mắc nối tiếp vào hai cực, một dòng điện chạy sẽ qua mạch và có sự sụt áp trên Rx. Khi đó, điện áp ra Vy khi có tải sẽ là
4-1
.png)
Như vậy điện áp xuất hiện ở hai đầu tải ngoài (Rl) bị giảm xuống một lượng bằng lượng sụt áp trên điện trở trong (Rx) của phần tử vừa xét, Vy < Vx. Tải thay đổi thì Vy thay đổi và độ sụt áp thay đổi theo.
.png)
Hình 4-1: Mạch Thevenin tương đương của một cảm biến cho thấy hiệu ứng nạp tải
Nhìn vào phương trình (4-1) ta thấy rằng có thể giảm bớt hiệu ứng tải cho phần tử này nhờ tăng RL lên lớn hơn Rx nhiều lần, RL » Rx.
Ví dụ 4.1
Một bộ khuếch đại thuật toán cho ra một điện áp gấp 10 lần điện áp giữa hai cực vào (Vin). Trở kháng đầu vào của bộ khuếch đại là 10 kD. Một cảm biến cho ra điện áp tỷ lệ với biến thiên nhiệt độ theo hàm truyền là 20mV/oC. Cảm biến có trở kháng là 5 kD. Nếu nhiệt độ cần đo là 50 oC thì điện áp ra bộ khuếch đại là bao nhiêu.
.png)
Hình 4-2: Nếu bỏ qua hiệu ứng nạp tải thì có thể có các sai số trầm trọng ở đầu ra của mạch và ở hệ số độ lợi (K).
Giải:
Hình 4-2 (A) thể hiện sơ bộ cách bố trí thiết bị này. Điện áp ra của cảm biến khi không tải xác định theo hàm truyền của nó là Vt = (20 mV/oC).50oC = 1,0V. Vì bộ khuếch đại lý tưởng có hàm truyền là 10, vậy điện áp ra bộ khuếch đại là Vout = 10Vin = (10).1,0 = 10 V. Nhưng giá trị này không đúng thực tế vì chưa tính đến tải.
Hình 4-2 (B) thể hiện sự phân tích đúng đắn mạch này. Theo đó ta thấy có sụt áp trên điện trở ra của cảm biến, do vậy điện áp thực ra khỏi cảm biến giảm và điện áp ra của bộ khuếch đại sẽ phải tính theo công thức (4-1)
.png)
Trong đó, Vt = 1,0V, vậy Vin = 0,67V, nên điện áp ra thực tế của bộ khuếch đại là Vout = 10 x (0,67V) = 6,7 V.
3 Các mạch thụ động.
Các mạch thụ động đã từng được dùng nhiều trong công nghiệp do tích đơn giản và thực dụng của chúng. Ngày nay các mạch thụ động thường được thay thế bằng các mạch chủ động tương đương. Tuy nhiên một số ứng dụng thực tế của các mạch thụ động vẫn còn được sử dụng, ví dụ mạch phân áp, mạch cầu Wheatstone, mạch lọc v.v. trong phần này ta chỉ xem xét một số mạch thụ động điển hình.
3.1 Mạch phân áp (Divider Circuits)
Một mạch phân áp đơn giản như trong Hình 4-3 thường được dùng để biến đổi sự biến thiên điện trở thành biến thiên điện áp. Điện áp ra Vd được tính theo công thức tính tụt áp như sau
4-2
.png)
Trong đó Vs = Điện áp cấp vào; R1 và R2 = các phần điện trở. Cả R1 hoặc R2 đều có thể là điện trở cảm biến có điện trở biến thiên theo một đại lượng cần đo nào đó.
.png)
Hình 4-3: Mạch phân áp đơn giản dùng để biến đổi sự biến thiên điện trở thành biến thiên điện áp
Khi sử dụng mạch phân áp cần phải lưu ý đến những điểm sau:
- Sự biến thiên của Vd theo R1 hoặc R2 là không tuyến tính. Ngay cả khi điện trở đo biến thiên tỷ lệ với đại lượng được đo thì điện áp ra cũng không biến thiên tuyến tính theo điện trở.
- Trở kháng đầu ra hiệu dụng của mạch này là sự đấu nối song song của hai điện trở R1 và R2. Trở kháng này không lớn, do vậy phải cân nhắc đến sự nạp tải.
- Dòng điện sẽ chạy thường xuyên qua cả hai điện trở, do vậy công suất điện sẽ bị tiêu tốn trên cả hai, gồm cả cảm biến. Do vậy cần xem xét đến công suất định mức của cả hai: điện trở và cảm biến.
- Sự tiếp xúc giữa lưỡi gạt và điện trở sẽ sinh ra muội bám, gây ra điện trở bổ sung.
- Thang đo không liên tục vì phụ thuộc vào tỷ số điện trở cho một vòng dây quấn.
Ví dụ 4.2
Giả sử mạch phân áp trên Hình 4-3 có R1 = 10,0 kΩ và Vs = 5,00V. Nếu R2 là biến trở cảm biến có điện trở biến thiên từ 4,00 - 12,0 kH khi đại lượng được đo biến thiên trong một dải tương ứng. Hãy xác định:
a- Điện áp Vd nhỏ nhất và lớn nhất.
b- Dải biến thiên của trở kháng đầu ra.
c- Dải công suất tiêu tán trên cảm biến R2.
Giải:
a.Theo công thức 4-2, khi R2 = 4 kH ta có .png)
Khi R2 = 12 kH ta có
.png)
Vậy điện áp biến thiên từ 1.43V tới 2.73V.
b.Dải biến thiên trở kháng đầu ra xác định bằng cách lấy giá trị của R1 song song với R2 và thay R2 min vào phép tính ta có trở kháng nhò mhất, còn thay R2max vào, ta có trở kháng ra lớn nhất. Vậy kết quả là trở kháng biến thiên từ min là 2.86 kOhm tới max là 5.45 kOhm.
c. Công suất tiêu tán qua cảm biến này xác định theo công thức R(W) = V2/R2, thế R2min và R2max vào ta có được công suất tiêu tán từ 0.51 tới 0.62mW.
3.2 Cầu Wheatstone (Bridge)
Các mạch cầu thường được dùng để chuyển đổi những biến thiên trở kháng thành biến thiên điện áp. Một trong những lợi thế của mạch cầu khi được dùng như vừa nêu là mạch có thể được thiết kế sao cho điện áp được tạo ra sẽ biến thiên quanh giá trị không. Có nghĩa là việc khuyếch đại có thể được dùng để tăng mức điện áp đối với độ nhạy cảm cao với sự biến thiên của trở kháng. Ứng dụng khác của mạch cầu là để đo lường tính chính xác một trở kháng.
4.3.2.1 Cầu Wheatstone dòng 1 chiều (DC)
.png)
Hình 4-4: Một mạch cầu Wheatstone DC cơ bản
Mạch cầu đơn giản nhất nhưng cũng phổ biến nhất là mạch cầu DC wheatstone như vẽ ở Hình 4-4. Ta có thể thấy giữa hai dầu nguồn cấp là hai nhánh cầu, R1 nối tiếp R3 và R2 nối tiếp R4. Mạch này được dùng trong các ứng dụng chế biến tín hiệu có một bộ cảm biến thay đổi trở kháng theo sự thay đổi của biến quá trình. Rất nhiều kiểu hoán cải từ mạch cầu cơ bản này được dùng cho các ứng dụng cụ thể khác nhau. Ở Hình 4-4, vật có kí hiệu là G là phần tử dò điện áp, được dùng để so sánh điện thế giữa các điểm a và b của mạch. Trong hầu hết các ứng dụng hiện đại, bộ dò điện áp là một bộ khuếch đại có trở kháng đầu vào rất cao. Trong một số trường hợp một vôn kế cực nhạy có trở kháng khá nhỏ được dùng trong mạch, đặc biệt là với mục đích định chuẩn và làm dụng cụ đo các đại lượng nhỏ.
Trong phân tích đầu tiên này, ta giả thiết là trở kháng của phần tử dò là vô cùng, nghĩa là ta có một mạch hở.
Trong trường hợp này, lượng chênh lệch điện thế, AV giữa các điểm a và b đơn giản
là:
4-3
.png)
Trong đó: Va là điện thế tại điểm a so với c, Vb là điện thế tại điểm b so với c.
Các giá trị Va, Vb bây giờ có thể được tìm ra với lưu ý rằng Va chính là phần điện áp nguồn cấp phân chia ra giữa R1 và R3
4-4
.png)
Tương tự, Vb là phần điện áp sụt trên R4
4-5
.png)
Trong đó V là điện áp nguồn cấp.
Nếu bây giờ ta kết hợp các phương trình (4-3), (4-4) và (4-5), thì lượng chênh điện áp có thể được viết là
4-6
.png)
Sau khi biến đổi, biểu thức này được rút gọn thành
4-7
.png)
Phương trình (4-7) cho biết độ chênh lệch điện thế qua phần tử dò là hàm của điện áp nguồn cấp và giá trị điện trở ra sao. Vì có một hiệu số ở tử số của phương trình (4-7), nên rõ ràng là sẽ có một kết hợp của các điện trở để cho tử số bằng không, và do vậy điện áp chênh lệch giữa hai đầu của phần tử dò (G) bằng không. Đó chính là một điểm không (null). Rõ ràng là sự kết hợp này được xác định từ phương trình (4-7) có quan hệ
4-8
R1R4=R2R3
Phương trình (4-8) chỉ ra rằng khi nào một cầu Wheatstone được lắp ráp và các điện trở được chỉnh để cho phần tử dò ở điểm không, thì các giá trị điện trở phải thoả mãn phương trình cân bằng trên (4-8). Bất chấp điện áp nguồn dao động hoặc thay đổi, điểm không vẫn được duy trì. Các phương trình (4-7) và (4-8) giải thích sự ứng dụng của các cầu Wheatstone trong các ứng dụng điều khiển quá trình khi có sử dụng các phần tử dò có trở kháng vào cao.
Ví dụ (4-3)
Nếu một cầu Wheatstone như ở hình (Hình 4-4) có điểm không khi R1=1000D, R2=842 và R3=500D, hãy tìm giá trị R4.
Giải:
Vì cầu đang ở điểm không, nên ta tìm R4 khi dùng phương trình (4-8):
.png)
Ví dụ (4-4)
Các điện trở trong một mạch cầu được cho trước với R1=R2=R3=120D, R4=121D. Nếu điện áp nguồn là 10.0 vôn, hãy tìm độ chênh điện áp.
Giải:
Giả sử trở kháng phần tử dò rất cao, ta tìm độ chênh điện áp theo
.png)
4.3.2.2 Cầu Wheatstone dùng dòng xoay chiều (AC)
.png)
Hình 4-5: Mạch cầu xoay chiều AC
Khái niệm về mạch cầu Wheatstone ta vừa xem xét có thể được ứng dụng cả với trở kháng giống như với điện trở. Khi đó, cầu được thể hiện như trong Hình 4-5, và có nguồn xoay chiều kích thích, thông thường là nguồn tín hiệu điện áp hình sin. Cách phân tích mạch cầu AC tương tự như với mạch cầu DC, với trở kháng (Z ) thay cho các trở (R). Điện áp độ lệch trong cầu được tính như sau
4-9
.png)
Trong đó, E = điện áp nguồn kích thích hình sin, Z1, Z2, Z3, Z4 là các trở kháng của cầu.
Cầu cân bằng thì AE = 0. Vậy từ phương trình (4-9) ta có điều kiện trở kháng sau đây phải thỏa mãn
4-10
Z3 Z2 = Z1 Z4
Điều kiện này tương tự như điều kiện (4-8) cho cầu điện trở DC. Có một vài lưu ý khi sử dụng mạch cầu AC đó là điều kiện “cân bằng” (4-10) có thể bị nhạy với pha của tín hiệu kích thích. Nếu điều đó xảy ra, ta phải tạo được một điểm “cân bằng” cho cả tín hiệu đồng pha lẫn tín hiệu lệch pha 90o trước khi áp dụng công thức (4-10).
Ví dụ (4-5)
Một cầu AC sử dụng trở kháng như trong Hình 4-6. Hãy tìm giá trị của Rx và Cx khi cầu cân bằng (null).
.png)
Hình 4-6 Mạch cầu ac cho ví dụ(4-5)
Bài giải
Vì cầu cân bằng, cho nên ta có
Z3 Z2 = Z1 Zx
Hoặc
.png)
4-11
.png)
Phần thực và phần ảo phải thỏa mãn độc lập điều kiện cân bằng (4-10). do vậy
.png)
Điều khiển tự động, Bùi Hồng Dương
Danh mục sản phẩm
-
 Vật tư
1
Vật tư
1
-
Sản phẩm số
212
-
Dịch vụ
30
-
Máy
18
-
Thiết bị
15


Gallery